
在紧固件、冲压件、注塑件这些小零件的自动化上料中,蜘蛛手柔性上料工站几乎成了标配。
但真正跑起来才发现:想跑得快,又怕抖动和碰撞;想取料范围大,又怕边缘干涉……
smartPX多合一驱控一体机+PH3电机,在一套实际运行的Delta蜘蛛手柔性上料工站中,交出了一份漂亮的答卷。
工站长什么样?
这套工站由蜘蛛手机器人+视觉系统+振动盘+吸嘴构成,专门抓取螺丝、螺母、车床件、冲压件、冷镦件等可平稳放置的紧固件。

设备的要求很明确:
节拍要达到每分钟60到100个,负载0.5kg,定位精度控制在±0.5mm以内。
同时,取料范围要尽可能大——吸嘴要能探到振动盘边缘附近,但高速运动时绝不能和边缘发生碰撞。另外还要支持皮带跟踪取放料,并能与视觉系统、振动盘通过TCP/IP和ModbusTCP进行通讯。

高创运动控制综合解决方案如何接招?
1.算力够强,路径规划又快又细
SmartPX控制器内置的高灵活性轨迹规划算法配合高性能驱动器的微插补功能,实现了运动轨迹的极致平顺和高速响应,在高速抓取任务中,这直接决定了能否满足客户严苛的节拍需求。

2.双重平滑,高速运行“稳如磐石”
客户最初担心:速度提上去后,机台和吸嘴会抖动,影响放料精度和设备寿命。
高创的做法是多层平滑:
轨迹前瞻:在运动过程中设定多段轨迹的拼接过渡段,让机器人走线更流畅。
指令平滑:利用驱控一体自带的指令平滑功能,在确保多轴轨迹同步且可预测的前提下,实现电机电流指令的平滑处理。
实际运行下来,即使高速往复,机器人和吸嘴末端都非常轻盈、平稳。
3.自动规划路径,取料范围大还不碰撞
为了兼顾“尽可能大的工作范围”和“高速运行不碰撞”,控制器会根据不同工作位置自动规划运动曲线。
比如在振动盘边缘取料时,系统会自动限制过冲轨迹,既让吸嘴能接近边缘,又不会因惯性撞上盘体——这一点在狭小空间内尤其关键。
4.通讯与标定一步到位
视觉系统和振动盘通过TCP/IP、ModbusTCP接入smartPX,配合相机与机器人坐标系标定,实现精准抓取。同时支持皮带跟踪,可以动态跟随皮带取料或放料,为后续联线生产留好接口。
实际跑出来的效果怎么样?
在带产品实际生产中,51秒完成了63个产品的摆盘——算下来相当于每分钟稳定抓取75个,完全满足60~100pcs/min的区间要求。
为了测试极限,设备还做了空跑测试:取消吸气等待,用视觉模拟摆盘,最低36秒跑完一轮,折算下来每分钟可达105次。
这个数据说明,控制系统的响应能力和路径平滑能力完全能支撑更高节拍的潜力。
这套方案的亮点在哪里?
如果用一句话总结:高性价比+功能完善+运行平稳+安全不碰撞。
具体来说:
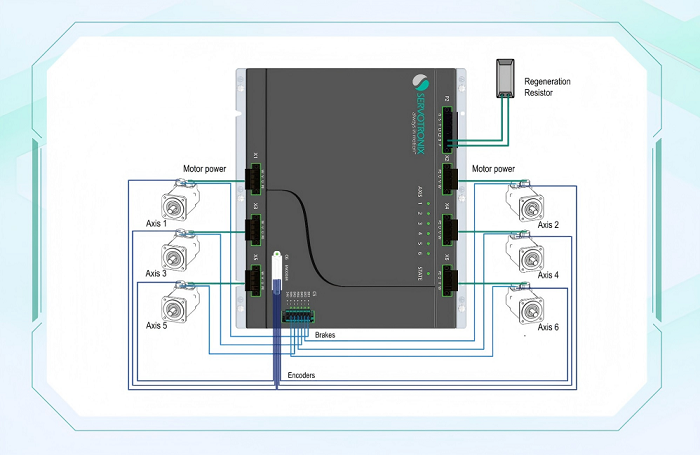
· 驱控一体:smartPX内置机器人运动控制器(支持Codesys或SoftMC)和4轴伺服驱动器,还自带集成16路DI(8路Fast DI)、16路DO(8路Fast DO)。一台设备搞定控制+驱动,省空间也省成本。
· 完整易用的工具链:示教、手动操作、参数修改、路径监控界面齐全;支持多种坐标系切换、多工具坐标系、视觉标定、皮带跟踪,以及多区域高度补偿——高精度场景也不怕。
· 运行轻盈稳定:路径平滑+驱动器电流平滑,让蜘蛛手高速往复时依然动作柔顺,末端吸嘴不抖,设备寿命更长。
· 自动防碰撞路径规划:在大取料范围和高速之间自动平衡,让工程师不必反复手动调整轨迹。
· 多语言兼容的SDK:在客户需要自行开发示教软件或上位机时,SmartPX可提供如C/C++,C#,Javascript等语言的SDK开发工具,帮助客户快速实现相关软件的开发工作
对于要求每分钟60~100个节拍、±0.5mm精度、大范围取料且不能碰撞的蜘蛛手柔性上料场景,smartPX+PH3提供了一个高性价比、即用性强、运行平稳的完整解决方案。未来,高创将持续深耕运动控制领域,持续迭代技术与方案,助力更多制造企业实现自动化、智能化升级,赋能产业提质增效!
邀您亲临2026华南国际工业博览会,现场见证!
想亲眼看看smartPX+PH3驱动的蜘蛛手如何实现高速稳定抓取?想与技术团队面对面探讨柔性上料、高速防撞等实战难题?本次展会上,smartPX多轴驱控一体机也是我们的重点展品之一,欢迎您近距离了解它的高性能与易用性。
高创诚邀您莅临展台,解锁更多运动控制新品及行业解决方案。
展会时间:2026年6月10日-12日
展会地点:深圳国际会展中心(宝安新馆)
展馆地址:广东省深圳市宝安区福海街道展城路1号
高创展位号: 10H-A026

扫码免费报名参观
不见不散,期待与您共话智能制造新未来!